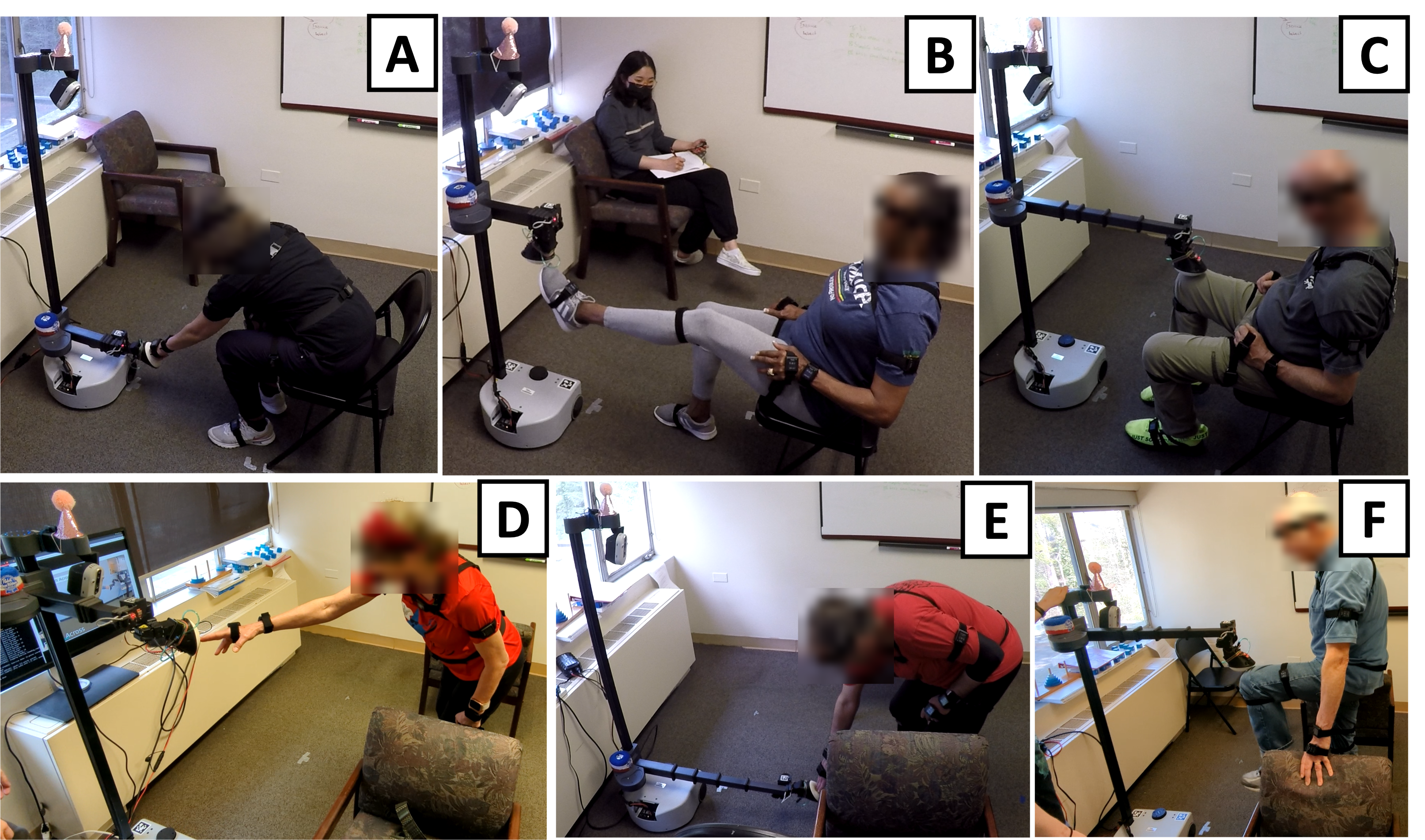
Physical therapy (PT) is a key component of many rehabilitation regimens, such as treatments for Parkinson's disease (PD). However, there are shortages of physical therapists and adherence to self-guided PT is low. Robots have the potential to support physical therapists and increase adherence to self-guided PT, but prior robotic systems have been large and immobile, which can be a barrier to use in homes and clinics. We present Stretch with Stretch (SWS), a novel robotic system for leading stretching exercise games for older adults with PD. SWS consists of a compact and lightweight mobile manipulator (Hello Robot Stretch RE1) that visually and verbally guides users through PT exercises. The robot's soft end effector serves as a target for users to repetitively reach towards and press with a hand, foot, or knee. For each exercise, target locations are customized for the individual via a visually estimated kinematic model, a haptically estimated range of motion, and the person's exercise performance. The system includes sound effects and verbal feedback from the robot to keep users engaged throughout a session and augment physical exercise with cognitive exercise. We conducted a user study for which people with PD (n=10) performed 6 exercises with the system. Participants perceived the SWS to be useful and easy to use. They also reported mild to moderate perceived exertion (RPE).
The SWS is a robotic system designed for physical therapy, featuring a dynamic exercise difficulty adjustment mechanism. This system tailors its approach to individual users in three distinct ways:
Sws can personalized the exercise to the user's body dimension. The robot can estimate the user's body dimension by measuring the user's height and arm length. The robot can also directly sample the user's range of motion by asking the user to reach the robot's end effector. The robot can then adjust the exercise to the user's body dimension.
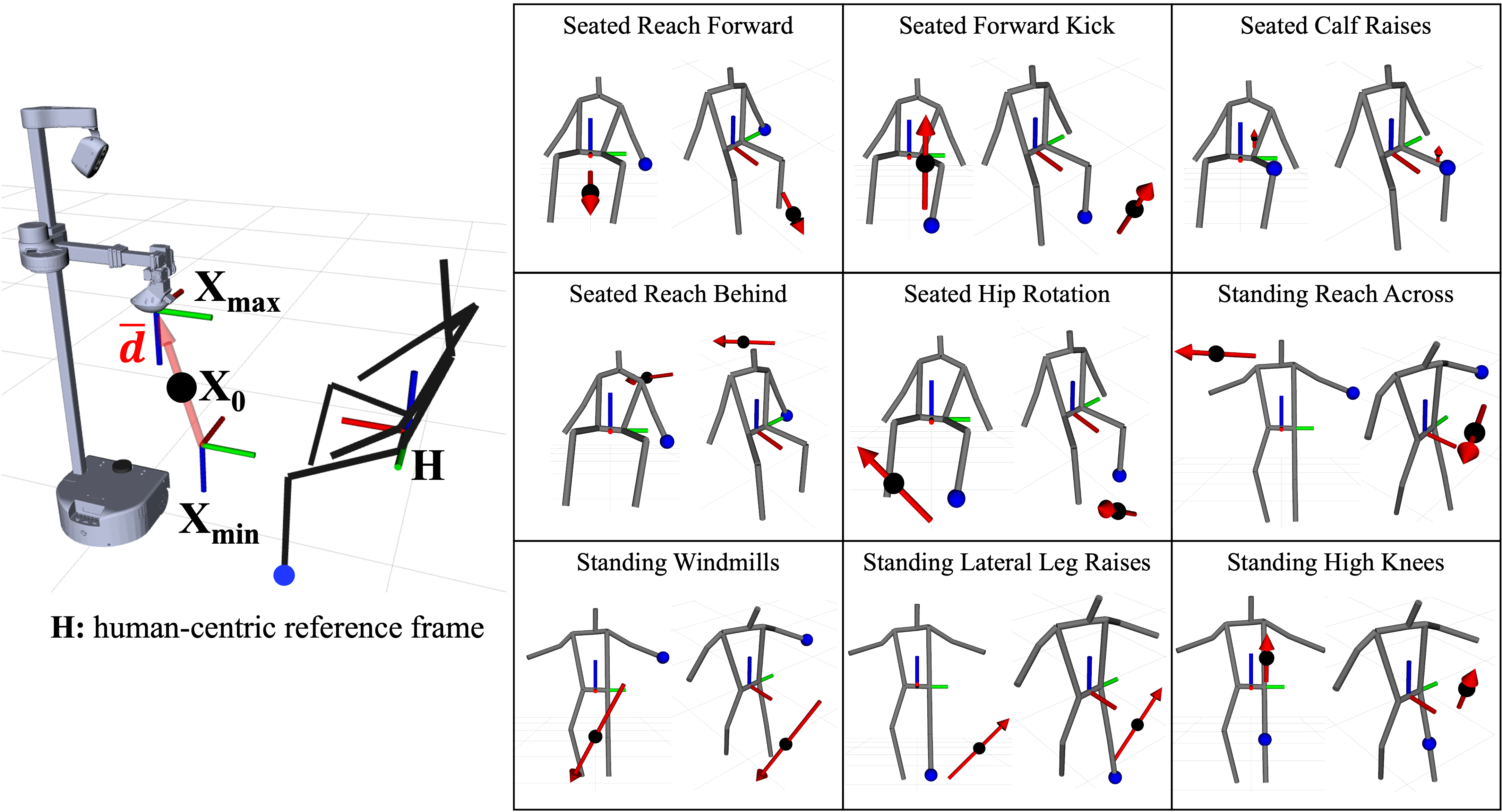
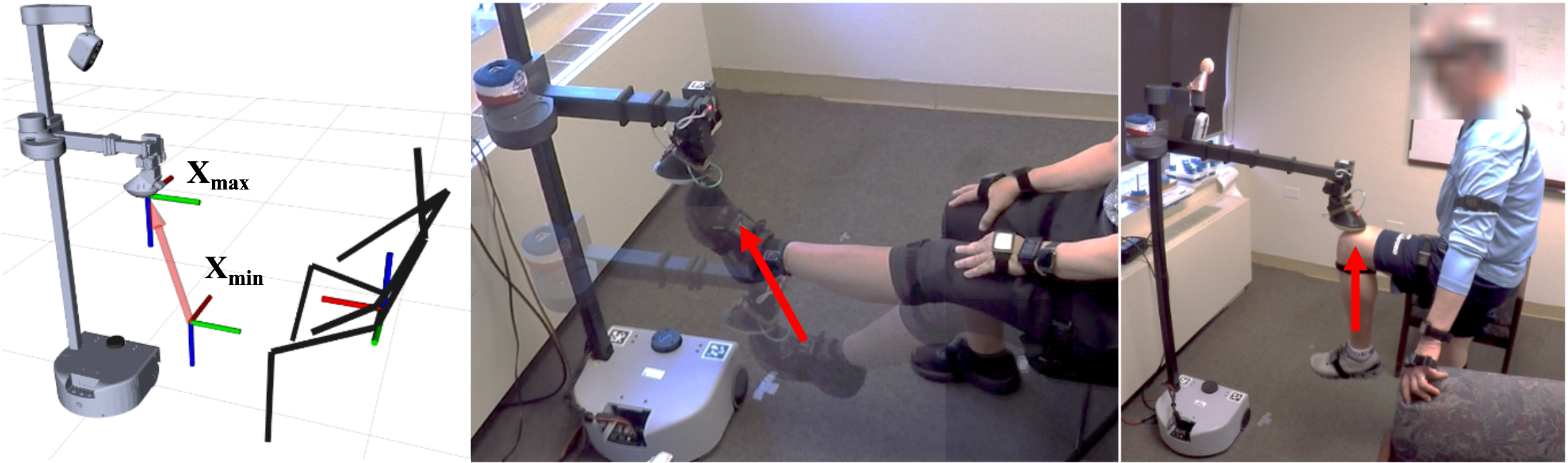
Sws is able to directly capture the range of motion of the user by having the user interacting with the robot's end effector, which serves as a target. The robot can then adjust the exercise to the user's range of motion.
The exercise difficulty is dynamically adjusted based on the user's performance. The robot can adjust the exercise difficulty by moving along a difficulty vector. The difficulty vector is computed based on the user's kinematic model. All components are personalized according to the user's kinematic model, range of motion, and current performance, which are then recorded for further analysis.
In our user study involving ten participants, we found that individuals with Parkinson's Disease (PD) have a favorable perception of the SWS system, viewing it as both beneficial and user-friendly. Our current robotic system offers verbal instructions and auditory feedback to the users. As part of the therapeutic process, participants engage in cognitive exercises, such as naming various U.S. states and animals during their physical activities. Our findings indicate that people with PD are generally capable of accurately following and executing exercises guided by a robot, underscoring the potential of robot-led physical therapy. A comprehensive analysis of these results can be found in the accompanying paper.